
INTRODUCTION
This article is an attempt by the author to relate the basic concept of submarine design parameter with respect to operation and understanding how the submarine operates at the surface of the sea, below the surface of the sea, and at the bottom of the surface of the sea, in an upright position.
A submarine operation consists of horizontal movement of the surface at the sea with at least 10%, positive reserve of buoyancy in order to dive easily in case of emergency.The submarine under the surface of the sea can operate in vertical and horizontal movement with neutral buoyancy and entirely dependent on the angle of dive of the submarine hydroplane and the capacity of the pressure hull to withstand the hydrostatic pressure with increasing intensity directly proportional to the depth of dive. The submarine’s strength for deeper dive is limited to her design hull, a structural limitation called the Collapsed Depth.
The submarine is also constrained to transmit and receive communication signals to avoid being detected. Transmission and reception of communication signal underwater is difficult because radio waves do not travel well through good electrical conductors like sea water. The primary defense of the submarine is solely dependent on its ability to remain concealed in the depth of the ocean.
To communicate, the solution for the submarine is to come near the surface of the sea level for the use of ordinary radio transmission. However, the submarine is vulnerable of being detected while cruising underwater near the surface of the sea.
The submarine carries a variety of sensor arrays and relies solely on passive and active SONAR to navigate and locate the target. Water is an excellent conductor of sound. Sound propagation, projection and receipt of the returning “echo” – are critical aspects in submarine underwater navigation and tracking of target.
COMMUNICATION SYSTEM
The submarine communication systems consists of the following:
- Very Low Frequency (VLF) – radio waves from 3-30 kHz can penetrate seawater at least 20 meters in depth from the surface of the sea. A submarine in operation in extremely shallow waters utilizes this frequency. It uses a buoy to rise a few meters, just below the surface of the sea.
- Extremely Low Frequency (ELF) – Electromagnetic waves from 3-300 kHz can penetrate the sea water at depth of 100 meters or less.
- Communication normally is one-way transmission as much as possible.
- Standard Radio – at the surface, the submarine can use HF, VHF and UHF to transmit information by voice underwater acoustics or hydro acoustic signals.
How the SONAR works
Through sound propagation using transponder and measurement of the returning echo, it utilizes sound waves in the direction of the object to map and locate objects in the surrounding environment.
In Anti-Submarine Warfare, the active SONAR system functional diagram is shown in Fig. 1 below.

Fig. 1 Active SONAR System Diagram
The transducer array projects the sound signal and for the same purpose receives the returning echo.
Fig. 2 Passive SONAR System Diagram
The hydrophone array picks-up and receives the returning echo projected by the transducer array or tele-printer modulation.
Underwater Modems
These transmit digital information while underwater using acoustic sound (modem and fax) frequencies of 900 kHz to 60 kHz, up to a distance of 17 miles.
Combination of Acoustic and Radio Transmission
An underwater transmitter sends a signal to the acoustic speaker pointed upward to the surface of the sea to send sound signals that can travel as pressure waves. When the sound waves hit the surface, it will cause tiny vibrations. Above the water, the radar continuously bounces a radio signal off the water surface. The radar can detect vibration, completing the signal journey from the underwater speaker to an in-air receiver. This technology is still in the infancy stage.
Sensors Systems
A submarine is only as good as its electronics detection system. The SONAR (Sound Navigation and Ranging) provides a system to navigate underwater, communicate or detect object underwater as well as in the surface of the sea. There are two (2) types of SONAR systems.
- Passive SONAR – underwater sensor mainly for listening to sound emissions from underwater or surface contacts. The passive SONAR can avoid being detected because it doesn’t project sound signals.
- Active SONAR – underwater sensor mainly for projection of sound signals and listening to the returning “echo.” Both sensors, can locate and do measurements of acoustic frequencies from a very low (infrasonic) to extremely high (ultrasonic). This type of SONAR would reveal the presence of the submarine underwater.
Towed Array SONAR System
This is the linear array of a hydrophone towed behind the submarine or ship. It is similar to the variable depth SONAR. The linear arrays are towed behind in order to isolate the system from the noise generated by the ship or submarine machines.
Towed Array is either SURTAS or SUBTAS. Whereas SURTAS is used by surface ships, SUBTAS is used by submarines.
Fig. 3 Towed Array SONAR System (TASS)
SONOBUOY
This is a small self-contained SONAR System employed by an aircraft. The information pick-up by the SONOBUOY is transmitted back to the aircraft by Very High Frequency (VHF) radio link. The SONOBUOY is self-destructing after some period of time. It is used to detect a submarine underwater, and feed the information to the aircraft, which then sends the information to the submarine.
Fig. 4 SONOBUOY Deployment
Capabilities of SONOBUOY
The following are types of SONOBUOYs:
- DIFAR – direction finding acoustic receiver; a passive system with hydroplane array transmitted into back to aircraft.
- DICASS – directional Command active system which transmits pulses back to aircraft
- VLAD – vertical thin line-array hydroplane; improves directionality back to aircraft with reduced noise from the submarine.
BI-STATIC SONAR
This is a combination of active and passive sonar systems for reception and transmission sharing of information of underwater targets by Anti-Submarine Ships and Anti-Submarine Helicopters.
Fig. 5
NON-ACOUSTIC DETECTION
The submarine cruising underwater near the surface is vulnerable to visual detection. Periscopes and antennae or a mast can protrude at the surface of the water. The mast creates a wake called feather. It also leaves a remnant scar of a long streak of foam or bubbles at the surface of the sea.
RADAR
The periscope mast exposed above surface of water can be detected by specially designed radar. The periscope generally is very hard to detect by ordinary radar. The ISAR (Inverse Synthetic-Aperture Radar) has been very effective in detection and tracking of submarine periscope.
INFRARED DETECTION
The heat from a submarine emitted by the propulsion system is also vulnerable to infra-red detection and becomes its heat signature specially when snorkeling and re-charging battery.
MAGNETIC ANOMALLY DETECTION (MAD)
This measures the change of earth magnetic field due to the presence of large magnetic ferrous materials found in the submarine, which can be detected in extremely shallow water. It can provide information on the exact location of the submarine.
CYLINDRICAL TRANSDUCER ARRAY
This is a reduced beam with projection in vertical direction. It is mounted on the hull array and only receives sound with downward direction.
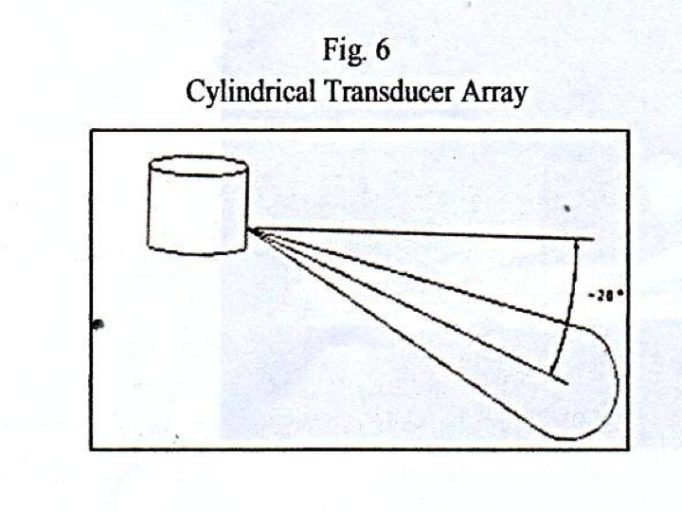
Fig. 6. Cylindrical Transducer Array
FLANK ARRAY SONAR
This provides efficient beams forming a scan, which rejects its own ship noise, port and starboard beam. It has an increased detection and classification performance at high speed maneuver. It has excellent bearing resolution/discrimination.
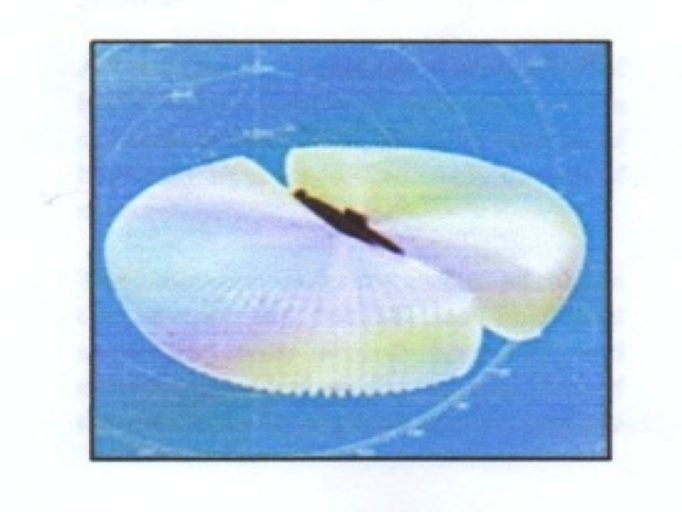
Fig. 7. Passive Flank Array Sonar
RECOMMENDATION
The shipbuilder or ship designer venturing into submarine design can adopt this article as a preliminary source of information on some of the basic communication and sensors to outfit a diesel electric submarine.
Sources/Resources:
- Akash Peshin. Science ABC.
- Arizona State University.
- National Oceanic and Atmospheric Administration (NOAA).
- Exploration, National Science, Art and Human Perception
- INS, Kalvari, The Economic Times, Defense Scorpene Class Submarine, 14-Dec-2017.
- Akash Peshin. SONAR Systems.
- UK Thales Underwater Systems, Ltd.
About the Researcher:
CAPT TOMAS D BAINO PN (Ret) completed his post-graduate studies in Submarine Design at the Department of Naval Architecture, University College of London, United Kingdom of Great Britain, under the sponsorship grant of the UK Ministry of Defense. Capt Baino is an associate editor of the Maritime Review, providing series of articles on Naval Ship Design and presently serving as Naval Architect Consultant with the Department of Transportation and the Philippine Coast Guard Project Management Office in ship acquisition program.